



Oscar Schofield* & Josh Kohut
Южный океан, омывающий Антарктику, – объект сложный, и его исследование является далеко не простой задачей, поскольку суровые природные условия зачастую ограничивают возможности отбора проб для сбора океанографических данных. Разнообразие физических, химических и биологических процессов, требующих исследования в широком пространственно-временном масштабе, вызывает необходимость наличия широкого комплекса технологий для сбора данных. Возможности океанографов постоянно расширяются благодаря новым технологиям наблюдения. Спутниковое наблюдение и отбор проб с борта морских судов являются основным подходом к составлению карт состояния вод океана, дополняемым стационарными источниками данных – заякоренными буйковыми станциями и станциями берегового базирования. Морские передвижные исследовательские платформы представлены буйковыми профилографами, глайдерами и автономными подводными аппаратами, которые обеспечивают возможность составления карт пространственных данных по глубине воды. Численное моделирование является ещё одним крайне важным средством, подводящим нас к пониманию морских экосистем и процессов, а также взаимосвязей в системе океан–атмосфера. Наблюдательная сеть в сочетании с сетевым моделированием составляют жизненно важную основу для понимания океана и прогнозирования его вероятного состояния в будущем.
Понимание динамики Южного океана имеет исключительно важное значение для углубления понимания земной системы, так как он оказывает несоразмерно сильное воздействие на глобальный климат и биохимические процессы. Отбор проб в Южном океане представляет существенные трудности ввиду суровых природных условий из-за сильных ветров, очень сильного волнения, ледовой обстановки, сплошной облачности и затяжного дневного ухудшения освещённости. Кроме того, целый ряд ключевых процессов характеризуются широким пространственно-временным масштабом (рис. 1), который не способна удовлетворить ни одна технология отбора проб (рис. 2).
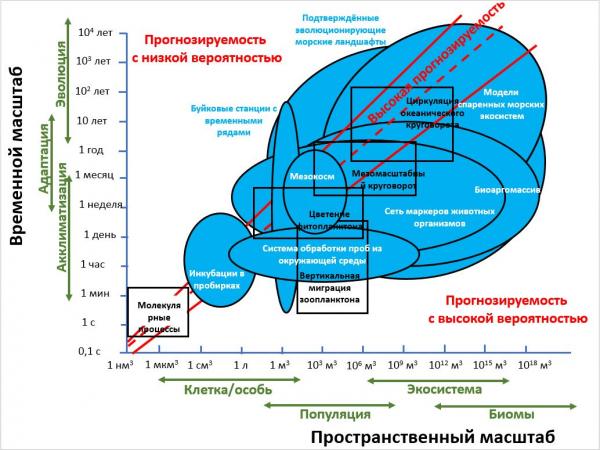
Рисунок 1. Модель Стоммела пространственно-временного масштаба процессов, протекающих в океане (источник Кавана и др. (Kavanaugh et al.) [17]
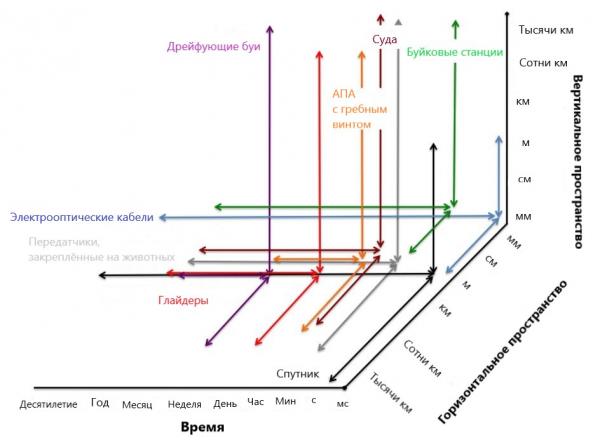
Рисунок 2. Пространственно-временные возможности по отбору проб (сбору данных) океанских платформ. Разные платформы обозначены разным цветом Необходим многоплатформенный подход к проведению исследований с использованием множества технологий для отбора проб и сбора данных в соответствующих временных и пространственных областях [1]. Имеется много платформ для измерения параметров водной среды, и несмотря на то, что приведенные ниже описания не являются исчерпывающими, они всё же дают общее представление об основных подходах. Платформы оборудованы датчиками физических, химических и биологических параметров, и хотя большинство современных датчиков предназначены для корабельного базирования, некоторые из них пригодны для установки на автономных платформах.
Необходим многоплатформенный подход к проведению исследований с использованием множества технологий для отбора проб и сбора данных в соответствующих временных и пространственных областях [1]. Имеется много платформ для измерения параметров водной среды, и несмотря на то, что приведенные ниже описания не являются исчерпывающими, они всё же дают общее представление об основных подходах. Платформы оборудованы датчиками физических, химических и биологических параметров, и хотя большинство современных датчиков предназначены для корабельного базирования, некоторые из них пригодны для установки на автономных платформах.
Датчики
Большинство имеющихся датчиков предназначены для измерения физических и геофизических параметров, таких как температура, солёность, давление, скорость течения, волнение и сейсмоактивность. За исключением сейсмических датчиков большинство датчиков физических параметров пригодны для установки на указанных ниже платформах. Целый ряд физических параметров являются главными в построении численных моделей океана. Современные датчики химических параметров способны измерять концентрацию растворённых газов (в основном кислорода), и на рынке уже появились датчики содержания биогенных веществ (в основном азота). Биологические датчики сегодня представлены оптическими и акустическими датчиками. Оптические датчики используются для сбора информации о концентрации, составе и физиологическом состоянии фитопланктона. Акустические датчики предоставляют информацию о наличии и количественных показателях организмов от зоопланктона до рыбы в зависимости от заданного частотного диапазона. В настоящее время ведётся активная разработка датчиков химических параметров для определения содержания целого ряда биогенных веществ, солёности, pH, газов и пигментов в непрерывном режиме, а не только при отборе проб воды. Режим непрерывных измерений позволяет исследователям определять документально подтверждённые тенденции в развитии физических, химических и биологических систем, что закладывает основу для построения концептуальных и численных моделей, позволяющих проверять корректность нашего понимания функционирования систем. Использование массивов данных в различных сочетаниях позволяет обеспечивать пространственный охват от местного до регионального с последующим использованием достоверных численных моделей для заполнения пробелов. Настоящая статья даёт лишь минимальное общее представление о датчиках, и для получения подробных сведений в отношении конкретных датчиков следует обращаться к указанным ниже источникам информации.
Исследовательские платформы
Суда. Основной исследовательской платформой для океанографов служат суда, которые, вероятно, так и будут оставаться главным элементом исследовательской инфраструктуры в обозримом будущем [2]. Для обеспечения возможности круглогодичного отбора проб в Южном океане требуются суда ледового класса. Морские суда с огромным множеством датчиков являются идеальной исследовательской платформой, однако их эксплуатация требует больших затрат и зачастую ограничивается морскими условиями и ледовой обстановкой. На сегодняшний день суда являются единственным средством, обеспечивающим возможность дискретного отбора проб, например при помощи барабанов колтюбинговых установок (см. рис. 3), для последующего анализа с использованием современной аппаратуры.

Рисунок 3. Развёртывание барабана колтюбинговой установки на участке пакового льда для измерения температуры и солёности по глубине воды и отбора проб воды на разных глубинах для последующего анализа (Фото:М. Хоппманн (M.Hoppmann))
Станции отбора и анализа проб. Целый ряд стран эксплуатируют прибрежные станции по всему побережью Антарктики для долгосрочного сбора данных о состоянии прибрежной морской и земной среды и окружающей атмосферы, имеющих значение для понимания Южного океана. Одним из наглядных примеров этого является Участок долгосрочных экологических исследований на архипелаге Палмера вдоль западного побережья Антарктического полуострова.
Спутники. Спутники являются важнейшим океанографическим научно-техническим средством современности [3]. Спутниковые наблюдения способствовали многочисленным прорывам в основополагающем понимании океанов [4], позволив понять как региональные, так и глобальные особенности, связанные с мезомасштабным распространением физических и биологических параметров, таких как течения и распределение фитопланктона. Данные спутниковых наблюдений имеют решающее значение в прогнозировании погоды и состояния океана. Спутниковые датчики физических параметров обеспечивают данные о температуре поверхности океана, скорости и направлении ветра, топографии поверхности океана, распределении и толщине морского льда, а биологические и химические параметры выводятся из данных радиометров цвета воды океана. Новая технология обеспечивает возможность мониторинга толщины морского льда. Появление беспилотных летательных аппаратов (БПЛА) обеспечило возможность использовать низковысотные системы сбора данных в региональном масштабе.
Береговые радиолокационные станции. Высокочастотная РЛС обеспечивает одновременное определение скорости поверхностных течений океана на площади в несколько сотен квадратных миль. В каждом месте расположения РЛС обеспечивается измерение радиальных составляющих скорости поверхностных течений океана в направлении к или от места расположения [5, 6], а расчётные составляющие скорости позволяют определить скорость поверхностных течений (верхний метровый слой толщи воды) [7].

Рисунок 4. Устройство для непрерывного анализа проб планктона производства Longhurst-Hardy; при буксировке судном осуществляет отбор проб в косяках планктона с подачей образцов планктона на рулонный фильтр непрерывного действия (Фото: П. Кубби (P. Koubbi))
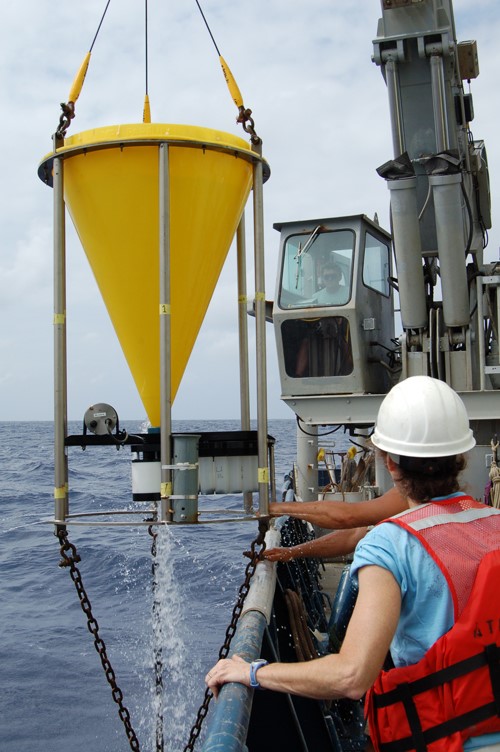
Рисунок 5. Развёртывание седиментационной ловушки для сбора частиц, оседающих с верхних слоёв воды на протяжении месяцев (Фото: Скайлар Бейер (Skylar Beyer))
Океанские заякоренные буйковые станции. С 1960-х годов современные буйковые станции обеспечили возможность проведения широкого спектра исследований, направленных на изучение роли океана в формировании климата, а также на углубление понимания биохимических процессов в океане, особенно при помощи использования седиментационных ловушек (рис. 5).
Буйковые станции являются основой многих глобальных исследовательских сетей по изучению взаимосвязей в системе океан–атмосфера, океанских течений и их скоростей (рис. 6), а также основой глобальной системы предупреждения о цунами. Они по-прежнему будут оставаться важнейшим элементом инфраструктуры наблюдения за океаном. Целый ряд таких станций также используются для изучения взаимосвязей в системе океан–лёд с использованием льда в качестве мёртвого якоря и подвеской датчиков во льду и подо льдом.

Рисунок 6. акустического доплеровского профилографа течений, обеспечивающего возможность заякорения на любой глубине для непрерывного измерения скорости течений (Фото: АСКА (ASCA))
Дрейфующие буи и поплавки. Пассивные дрейфующие платформы являются важными средствами сбора данных для составления карт параметров океана на поверхности и по глубине воды. Эти платформы являются относительно недорогими и, следовательно, могут применяться в больших количествах. Дрейфующие буи несут на себе большое количество датчиков, обеспечивающих сбор данных для составления карт поверхностной циркуляции вод мирового океана. Первые буи нейтральной плавучести были предназначены для наблюдения за глубинными течениями [8]. В начале 1990-х годов глубинные буи были оборудованы средствами связи [9] и в настоящее время являются элементами международного проекта «АРГО», в котором задействовано более 3800 буёв по всем просторам мирового океана (рис. 7).
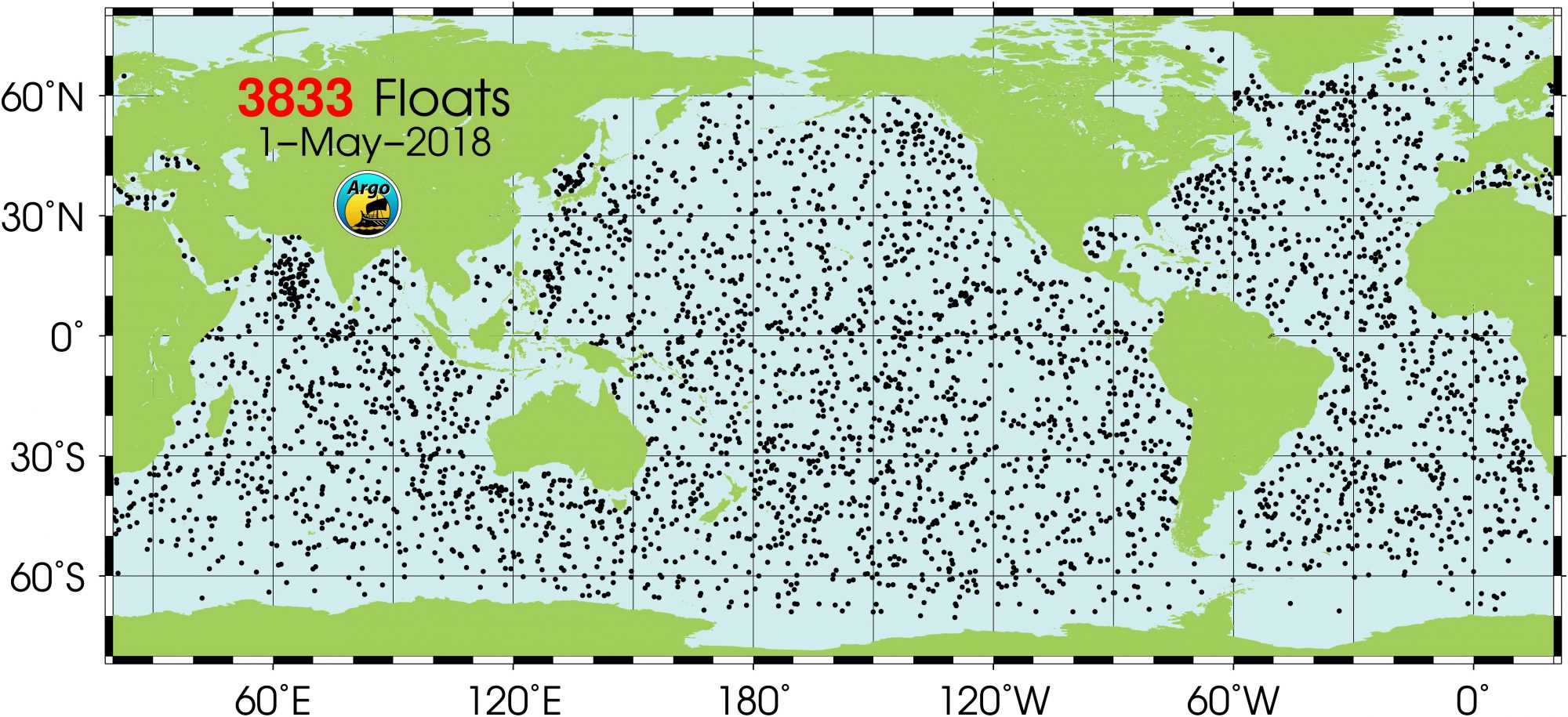
Рисунок 7. Глобальное развёртывание буёв в рамках проекта АРГО по состоянию на 1 мая 2018 года (http://www.argo.ucsd.edu/).

Рисунок 8. Глайдер с питанием от аккумуляторов будет систематически погружаться на несколько дней с выдерживанием заданного курса для сбора физических и химических данных (Фото: Bluefin Robotics)
Глайдеры. разновидность подводного аппарата, который за счёт изменения плавучести и наличия крыльев преобразует вертикальное движение в горизонтальное (рис. 8), что позволяет ему совершать поступательное движение при очень малом расходе энергии [10]. Глайдеры совершают поступательное движение в толще воды по пилообразной траектории, обеспечивая таким образом сбор данных в широком пространственно-временном масштабе. Для морской навигации аппарата предусматриваются периодическая GPS-привязка, датчики давления, датчики угла наклона и магнитные компасы. Используя механизм управления собственной плавучестью для поступательного движения, глайдеры характеризуются значительной дальностью и продолжительностью плавания (длительность похода до одного года и дальность свыше 10 000 км) [11,12,13, 14].

Рисунок 9. Опускание автономного подводного аппарата на дно океана для исследования нетронутых бентосных сообществ (Фото: Д. В Г. Уолтон (D. W. H. Walton))
Автономные подводные аппараты (АПА) с гребным винтом. Питание АПА осуществляется от аккумуляторов или топливных элементов, и они способны погружаться до глубины 6000 м (рис. 9). Аналогично глайдерам, АПА осуществляет передачу данных на сушу через спутник. Между GPS-определениями места и для выполнения высокоточных манёвров зачастую на борту АПА устанавливается инерциальная навигационная система для измерения перегрузок, действующих на аппарат, и скорости движения (в сочетании с доплеровским измерителем скорости). Для определения положения в вертикальной плоскости используется датчик давления. В отличие от глайдеров, АПА могут перемещаться против большинства течений с номинальной скоростью 3–5 узлов и, следовательно, осуществлять систематический сбор данных вдоль конкретной линии пути, на конкретной площади и (или) в пределах конкретного объёма [15].
Передатчики, закрепляемые на животных. Размеры датчиков уменьшились в разы, что обеспечило возможность прикрепления их к особям морской фауны (китам, птицам, тюленям и рыбам). В процессе своего естественного перемещения животные осуществляют сбор очень ценных массивов физических, химических и биологических данных о районах своего обитания и кормления [16].

Рисунок 10. Камера и электронные датчики, которые можно прикреплять к южным морским слонам или пингвинам для записи процесса плавания под водой и кормления, а также сбора подробных данных о температуре и солёности воды Южного океана на разных глубинах (Фото: Christophe Guinet CEBC-SNO-MEMO)