



Oscar Schofield* & Josh Kohut
Texte original en anglais – traduction française supervisée par Damien Desbruyères, Ifremer research scientist at LOPS, « Laboratoire d’Océanographie Physique et Spatiale » (Physical and Spatial Observation Laboratory)
L’Océan Austral qui entoure le continent antarctique est un milieu complexe et particulièrement difficile à étudier du fait de conditions hivernales rigoureuses qui limitent son échantillonnage régulier par les navires océanographiques. L’étendue des processus physiques, chimiques et biologiques à étudier sur une large gamme d’échelles temporelles et spatiales requière un une grande variété de technologies de mesures. De nouvelles technologies d’observations deviennent continuellement disponibles pour les océanographes. Les mesures satellitaires et à partir de navires représentent les approches privilégiées pour cartographier les propriétés de l’océan. Elles sont complétées par des plates-formes fixes tels les mouillages ou les systèmes littoraux. Des plateformes mobiles comme les flotteurs profileurs, les « gliders » (planeurs) ou les véhicules autonomes sous-marins, permettent la spatialisation des données océaniques de subsurface. Les modèles numériques sont également un outil essentiel pour améliorer notre compréhension des écosystèmes et processus marins et leur lien avec l’atmosphère. Plus généralement, le couplage des réseaux d’observations et de modélisations constitue l’approche fondamentale pour développer nos connaissances sur l’océan et pour construire notre capacité de prédiction de son évolution.
Comprendre la dynamique de l’Océan Austral est primordial pour développer notre compréhension du système Terre car cet océan joue un rôle majeur, au regard de sa taille relativement réduite, pour le climat global et les cycles biogéochimiques. L’échantillonnage de l’Océan Austral est néanmoins difficile du fait de conditions météorologique sévères (e.g. vents forts), d’une mer souvent forte, de la présence de glace, d’une couverture nuageuse importante ou encore de l’obscurité prolongée en hiver. De plus, beaucoup de processus clés s’étendent sur une large gamme d’échelles temporelles et spatiales (Fig. 1) qui ne peut pas être échantillonnée par un unique moyen de mesure (Fig. 2).
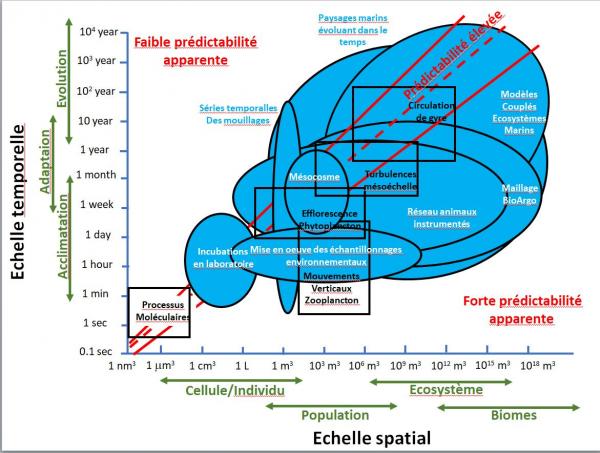
Figure 1. A Stommel diagram showing the range of spatial and temporal scales over which ocean processes operate (Source: Kavanaugh et al. [17]).
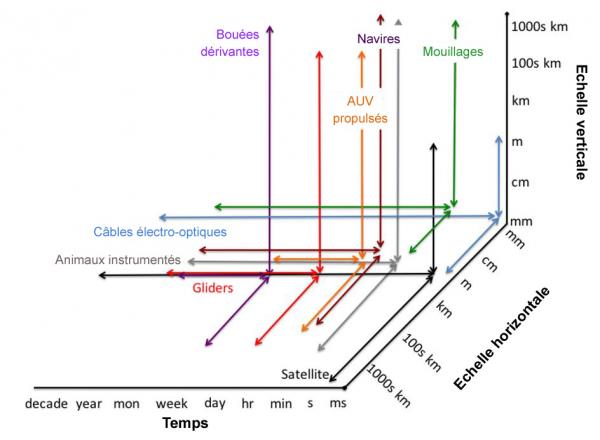
Une approche multi-plates-formes, utilisant plusieurs technologies, est nécessaire pour correctement observer ces échelles [1]. Beaucoup de plateformes sont disponibles pour effectuer de telles mesures et, bien que les descriptions ci-dessous ne soient pas exhaustives, elles fournissent un premier aperçu des principales approches utilisées. Ces plates-formes sont équipées de capteurs mesurant les propriétés physiques, chimiques et biologiques, et bien que la plupart des nouveaux capteurs soient le plus souvent embarqués sur des navires océanographiques, certains peuvent être déployés sur des plates-formes autonomes.
Capteurs
Les capteurs les plus développés sont ceux qui mesurent des variables physiques et géophysiques comme la température, la salinité, la pression, les courants, les vagues et l’activité sismique. Mise à part les instruments de sismologie, la grande majorité des capteurs physiques peuvent être déployés sur la plupart des plateformes décrites ci-dessous. La plupart des variables physiques constituent les mesures clé utilisées par les modèles numériques. Actuellement, les capteurs chimiques peuvent mesurer la concentration de gaz dissous (principalement l’oxygène), la matière organique dissoute, et des capteurs capables de mesurer les nutriments (principalement l’azote) sont désormais commercialisés. Les capteurs biologiques actuels sont des capteurs optiques et acoustiques. Les premiers sont utilisés pour fournir des informations sur la concentration, la composition et l’état physiologique du phytoplancton. Les seconds nous renseignent sur la présence et la quantité d’organismes depuis le zooplancton jusqu’aux poissons, selon la bande de fréquences utilisée. Le développement actif de nouveaux capteurs chimiques est en cours, pour mesurer grande diversité de nutriments, la salinité, le pH, les gaz et les pigments, de manière continue plutôt que par des prélèvements ponctuels d’eau de mer. Ces mesures, lorsqu’elles sont menées sur le long terme permettent aux scientifiques de documenter les tendances des processus physiques, chimiques et biologiques. Ce travail fournit les bases nécessaires au développement des modèles numériques conceptuels qui permettent de tester de notre compréhension du fonctionnement de ses systèmes. En combinant des jeux de données, les échelles spatiales allant du local au régional sont accessibles et les modèles numériques validés aident à compléter les manques. Cet article est une simple introduction et les articles cités en référence apporteront des informations plus complètes sur des capteurs spécifiques.
Plateformes
Navires: Les navires de recherche sont la principale plate-forme utilisée par les océanographes et resteront vraisemblablement l’infrastructure centrale dans un future proche [2]. Pour l’Océan Austral, des navires renforcés glace sont nécessaires pour échantillonner toute l’année. Les navires sont les plates-formes idéales, capable d’accueillir le choix le plus large de capteurs, mais les opérer est coûteux et leur utilisation est souvent limitée par les conditions de la mer et la glace.
Aujourd’hui, les navires océanographiques constituent néanmoins l’unique moyen d’échantillonnages discrets (avec par exemple des CTD et des rosettes) qui peuvent être ensuite analysés par de l’instrumentation plus perfectionnée (Fig. 3).

Figure 3. Rosette et CTD déployées dans le pack pour des mesures de profils verticaux de température et salinité (CTD) et pour des prélèvements d’eau (bouteilles Niskin en rosette) effectués à différentes profondeurs pour être analysés en laboratoire ultérieurement. (Photo : M. Hoppmann)
Stations de terrain: De nombreux pays maintiennent des stations côtières de recherche autour de l’Antarctique. Elles fournissent des mesures continues et à long-terme de variables marines côtières, terrestres et atmosphériques, pertinentes pour la compréhension de l’Océan Austral. Un bon exemple est le site de recherche écologique à long terme (Long Term Ecological Research) de Palmer sur la côte ouest de la péninsule Antarctique.
Satellites: La mesure par satellites est la technologie océanographique la plus importante des dernières décennies [3]. Les observations satellites ont permis de nombreuses avancées dans notre compréhension fondamentale des océans [4], en résolvant à la fois les caractéristiques régionales et globales associées à la circulation méso-échelle des paramètres physiques (e.g. courants) et biologiques (e.g. distribution du phytoplancton). Les données satellites sont fondamentales pour la prévision météorologique et la prévision des états de mer. Les paramètres physiques disponibles via ces plateformes spatiales documentent la température de surface, la vitesse et la direction du vent, la topographie de la surface de la mer, la distribution et l’épaisseur de la glace de mer, tandis que des paramètres biologiques et chimiques peuvent être dérivés de radiomètres mesurant la couleur de l’océan. De nouvelles technologies permettent le suivi à long terme de l’épaisseur de la glace de mer L’avènement des drones fournit désormais des systèmes de basses altitudes capables de collecter des données à l’échelle régionale.

Figure 4. Enregistreur continu de plancton “Longhurst-Hardy” pour le prélèvement d’essaims de plancton de surface : le collecteur est tracté derrière le bateau et préserve les organismes grâce à un filtre de type vis sans fin. (Photo : P. Koubbi)
Comment les chercheurs prélèvent-ils des échantillons et effectuent des mesures pour comprendre ses dynamiques et les corrélations?
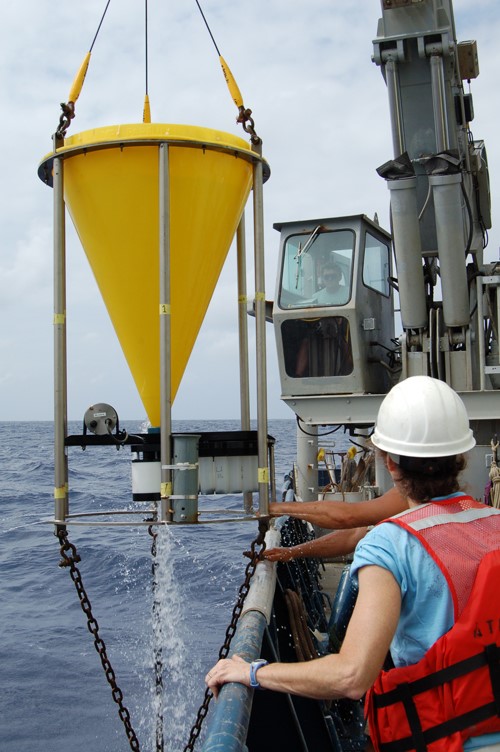
Figure 5. Déploiement d’une trappe à sédiments qui collecte, sur des périodes de plusieurs mois, les particules qui sédimentent depuis la surface. (Photo: Skylar Beyer)
Radars côtiers: Les radars hautes fréquences mesurent la vitesse des courants de surface sur quelques centaines de kilomètres carrés simultanément. Sur chaque site d’implantation, les composantes radiales (c’est-à-dire vers et depuis le site) de la vitesse de surface sont mesurées [5, 6] permettent d’estimer les courants de surface (sur le premier mètre de la colonne d’eau) [7].
Mouillages océaniques: Depuis les années 1960s, les balises flottantes modernes ont permis d’entreprendre des études variées sur le rôle de l’océan dans le climat, mais également d’amener des avancées significatives sur la biogéochimie marine avec, par exemple, des pièges à sédiments (Fig. 5).
Ces mouillages constituent la colonne vertébrale de nombreux réseaux d’observations dédiés aux études des interactions océan-atmosphère ou des courants marins (Fig. 6) et sont à la base du réseau global d’alerte aux tsunamis. Beaucoup de ces approches sont aussi utilisées pour l’étude des interactions océan-glace, notamment en utilisant la glace comme ancre fixe pour des capteurs dans et sous la glace.

Figure 6. Profileur courantomètre acoustique à effet Doppler qui peut être mouillé à n’importe quel niveau de la colonne d’eau pour mesurer continuellement les courants marins. (Photo: ASCA)
Flotteurs dérivants et profileurs: Les plateformes dérivantes passives sont des outils importants pour cartographier les propriétés océaniques de surface et de sub-surface. Leur coût relativement bas permet de les déployer en large nombre. Ils emportent de nombreux capteurs pour créer les cartes globales de circulation océaniques de surface. Les tous premiers flotteurs dérivants autonomes furent élaborés pour l’observation des courants de sub-surface [8]. Au début des années 1990s, des flotteurs de sub-surface avec une capacité de communication et de transmission ont émergé [9] et composent aujourd’hui le programme international « ARGO », qui déploie plus de 3800 flotteurs dérivants sur l’ensemble des océans du globe (Fig.7).
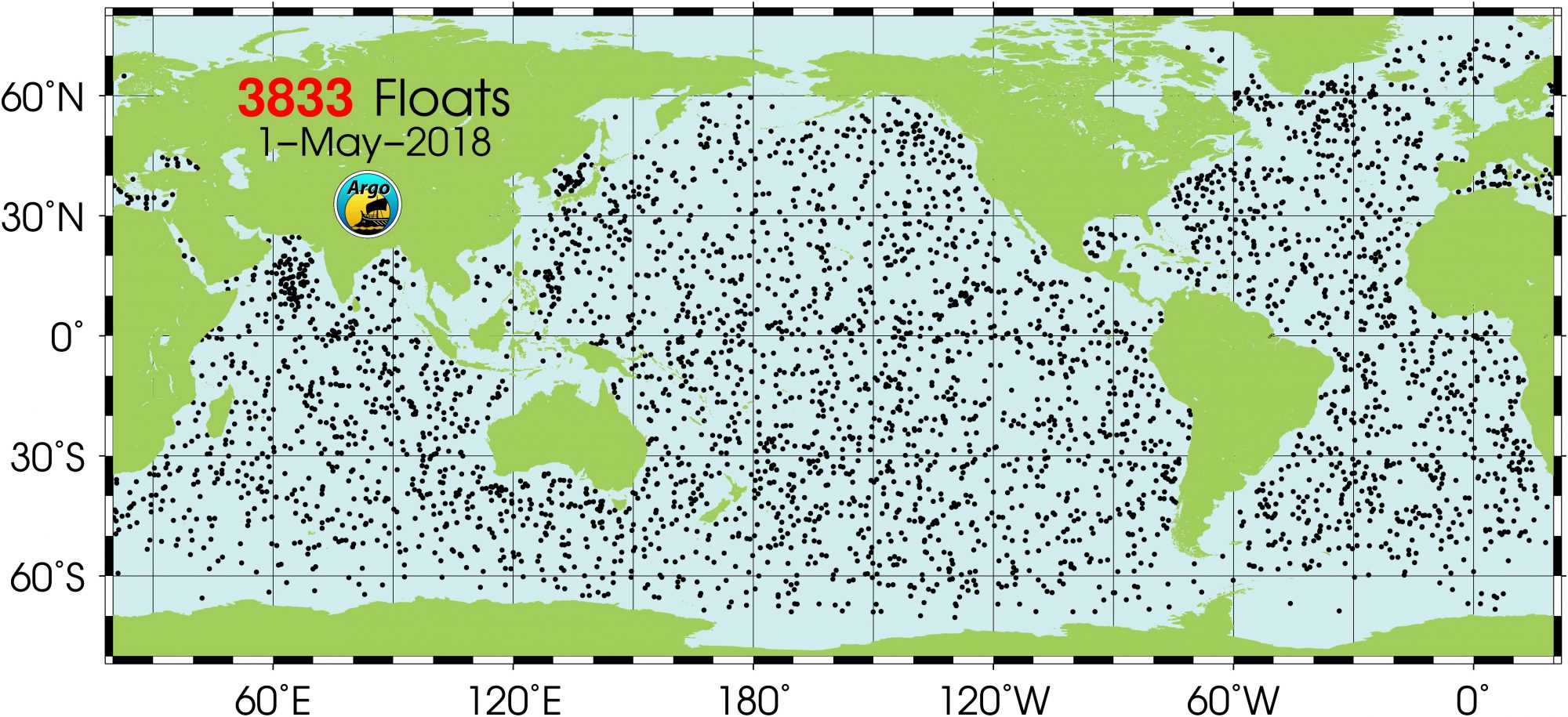
Figure 7. Déploiement à l’échelle globale des flotteurs ARGO en date du 1er mai 2018 (http://www.argo.ucsd.edu/).

Figure 8. Glider (planeur) électrique qui plongera à plusieurs reprises et sur plusieurs jours le long d’un trajet prédéfini pour récolter des données physiques et chimiques. (Photo : Bluefin Robotics)
Gliders: Un glider est un véhicule autonome sous-marin qui utilise des variations faibles de flottabilité et des ailes pour convertir ses déplacements verticaux en déplacements horizontaux (Fig. 8) pour se propulser, tout en gardant un consommation énergétique faible [10]. Les gliders suivent des trajectoires en dents de scie et fournissent ainsi des données sur de grandes échelles temporelles et spatiales. Ils naviguent avec l’aide des GPS de surface périodiques, des capteurs de pression, d’inclinaison et des compas magnétiques. Grâce à ce système de propulsion qui utilise leur flottabilité, les gliders couvrent des surfaces géographiques importantes et ont des durées de fonctionnement longues, avec des missions pouvant durer jusqu’à une année sur des dizaines de milliers de kilomètres [11, 12, 13, 14].

Figure 9. Descente d’un véhicule sous-marin autonome sur le fond marin pour étudier des communautés benthiques non perturbées. (Photo : D.W.H. Walton)
Véhicules sous-marins autonomes à hélices (AUVs): Les AUVs sont alimentés par des batteries ou des cellules à carburant et peuvent opérer à des profondeurs allant jusqu’à 6000 mètres (Fig. 9). Tout comme les gliders, les AUVs transmettent leurs données à terre par satellites. Pour des manœuvres précises entre positions fixes, des systèmes de navigation inertiels sont souvent utilisés à bord des AUVs pour mesurer l’accélération du véhicule et, combiné à une technologie Doppler, pour obtenir leur vitesse. Un capteur de pression mesure la position verticale du véhicule. Les AUVS, à la différence des gliders, peuvent naviguer à contre-courant à des vitesses nominales de 3-5 nœuds et peuvent donc suive de façon systématique une ligne, une surface ou un volume particuliers [15].
Les animaux équipés: Les capteurs ont désormais des dimensions si petites qu’ils peuvent être implantés sur la faune marine (baleines, oiseaux, phoques et poissons). Ces animaux collectent des données lors de leur déplacements, fournissant ainsi des jeux de données cruciaux sur la physique, la chimie et la biologie des régions où ils vivent et se nourrissent [16].

Figure 10. Des caméras et des capteurs électroniques peuvent être posés sur des éléphants de mer ou des manchots pour enregistrer leurs plongées et leur alimentation et également pour fournir des profils détaillés de la température et de la salinité dans l’Océan Austral. (Photo : Christophe Guinet CEBC-SNO-MEMO)