



Oscar Schofield* & Josh Kohut
El océano Austral que circunda la Antártida es complejo y presenta dificultades particulares para la investigación, ya que el muestreo oceanográfico se ve limitado por condiciones hostiles. Frente a los diversos procesos físicos, químicos y biológicos que es necesario investigar en una gran variedad de escalas espaciales y temporales, la recopilación de datos requiere un equipo muy variado de tecnologías. En la actualidad, los oceanógrafos cuentan cada vez con más tecnologías de observación. Los equipos satelitales y el muestreo realizado desde los barcos constituyen enfoques centrales en el mapeo de las propiedades oceánicas y se complementan con elementos fijos, como anclajes y sistemas terrestres. Las plataformas móviles incluyen flotadores de elaboración de perfiles, planeadores submarinos y vehículos subacuáticos autónomos que pueden generar mapas espaciales de datos subsuperficiales. Los modelos numéricos constituyen otra herramienta complementaria crucial para profundizar los conocimientos acerca de los ecosistemas y procesos marinos, así como de los vínculos entre el mar y la atmósfera. Con la combinación de las redes de observación y modelado, se obtiene una base crítica para conocer mejor el océano y predecir su posible estado en el futuro.
A la hora de profundizar nuestros conocimientos del sistema terrestre, es vital entender la dinámica del océano Austral, ya que este ejerce una influencia desproporcionadamente grande, con relación a su tamaño, tanto en el clima como en la biogeoquímica mundial. La realización de muestreos del océano Austral es difícil porque las condiciones son hostiles debido a los fuertes vientos, los mares muy agitados, el hielo, una nubosidad muy extendida y la prolongada oscuridad invernal. Además, muchos de los procesos clave cubren una amplia gama de escalas espaciales y temporales (Fig. 1) imposible de muestrear con un solo tipo de tecnología (Fig. 2).
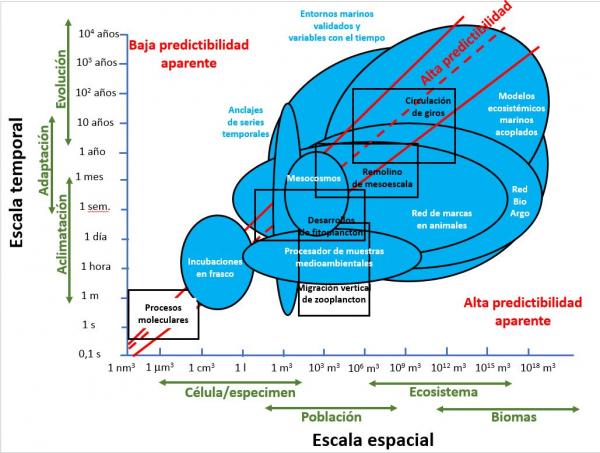
Figura 1. Diagrama de Stommel en el que se muestra la gama de escalas espaciales y temporales en las que operan los procesos oceánicos (Origen: Kavanaugh et al. [17])
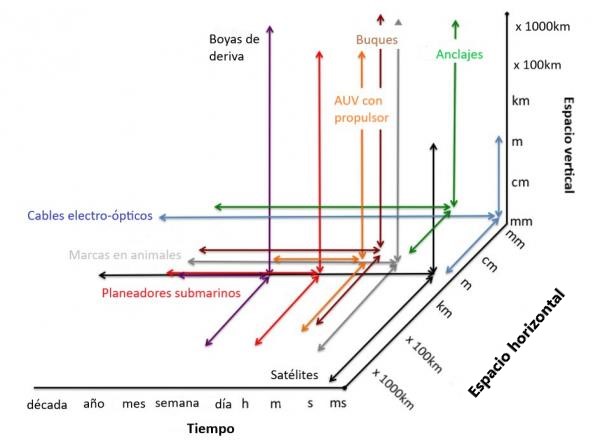
Figura 2. Capacidades de muestreo temporal y espacial de diferentes plataformas oceánicas. Los diferentes colores representan diversas plataformas.
A fin de realizar un muestreo de los dominios espaciotemporales adecuados, es necesario adoptar un enfoque multiplataforma con una amplia variedad de tecnologías [1]. Existen muchas plataformas disponibles para realizar mediciones acuáticas, y, si bien la lista no es exhaustiva, las siguientes descripciones ofrecen un panorama general de los principales enfoques. Las plataformas tienen sensores diseñados para medir propiedades físicas, químicas y biológicas. Aunque la mayoría de los sensores nuevos fueron creados para ser transportados por barco, algunos pueden utilizarse en plataformas autónomas.
Sensores
Los sensores más desarrollados son los que miden variables físicas y geofísicas, como temperatura, salinidad, presión, corrientes, oleaje y actividad sísmica. Salvo en el caso de las variables sísmicas, la mayoría de los sensores físicos pueden utilizarse en la mayoría de las plataformas enumeradas más abajo. Muchas de las variables físicas son las medidas clave utilizadas en modelos numéricos oceánicos. En la actualidad, los sensores químicos pueden medir gases disueltos (en especial, oxígeno) y material orgánico disuelto. En los últimos tiempos, también se comercializan sensores para medir nutrientes (sobre todo, nitrógeno). Los sensores biológicos actuales tienen componentes ópticos y acústicos. Los sensores ópticos se usan para obtener información sobre la concentración, la composición y el estado fisiológico del fitoplancton. Los sensores acústicos pueden arrojar información sobre la presencia y la cantidad de organismos —desde el zooplancton hasta los peces— según la banda de frecuencia seleccionada. Existe un desarrollo activo de nuevos sensores químicos para medir en forma constante una amplia gama de nutrientes, salinidad, pH, gases y pigmentos, más que de muestras de agua. Si las mediciones son constantes, los investigadores pueden documentar las tendencias en los sistemas físicos, químicos y biológicos, y esto sienta las bases para el desarrollo de modelos conceptuales y numéricos destinados a evaluar nuestros conocimientos sobre cómo funciona el sistema. Si se combinan conjuntos de datos de formas diversas, es posible analizar las dimensiones espaciales desde el plano local al regional y, posteriormente, usar los modelos numéricos validados para llenar los vacíos de información. En este artículo, se ofrece una introducción básica. Para obtener más información sobre los sensores específicos, consulte la sección Recursos.
Plataformas
Buques: La plataforma principal de los oceanógrafos siempre han sido los buques, y es probable que estos continúen siendo un componente central de la infraestructura en el futuro previsible [2]. En el caso del océano Austral, se requiere que los buques resistentes al hielo permitan realizar muestreos todo el año. Si bien los buques son plataformas ideales y cuentan con el conjunto más amplio de sensores, también resulta muy costoso operarlos, y suelen verse limitados por las condiciones del mar y del hielo. Hoy por hoy, los buques constituyen el único medio para recolectar muestras discretas que pueden analizarse mediante el uso de instrumentación avanzada, como las rosetas CTD (Fig. 3).

Figure 3. CTD rosette being deployed in pack ice to make measurements of the vertical profile of temperature and salinity as well as collecting water samples at various depths for later analysis (Photo: M.Hoppmann)

Figura 4. Equipo de registro continuo de plancton Longhurst-Hardy que realiza un muestreo de las agregaciones de plancton de superficie mientras es remolcado con el buque y preserva los especímenes en un rollo de filtro continuo. (Imagen: P. Koubbi)
Los batitermógrafos desechables (XBT) permiten realizar mediciones de perfiles acuáticos desde los buques en marcha y prácticamente en todas las condiciones marítimas. También es posible utilizar los buques para el remolque de sistemas destinados a recolectar material, lo que resulta ideal para el mapeo de distribuciones, como se demostró con el registro continuo de plancton que, en la actualidad, suministra información cada vez más abundante sobre el océano Austral (https://www.scar.org/science/cpr/home/) (Fig. 4). Los sistemas de sonido pueden registrar la temperatura del océano en transectos amplios y perfiles de corrientes a través de la técnica acústica Doppler, a la vez que los sonares de barrido lateral pueden mapear el lecho marino.
Estaciones sobre el terreno: Muchos países tienen estaciones costeras en la Antártida, que ofrecen mediciones de datos marinos litorales, terrestres y atmosféricos a largo plazo, en lo referido al conocimiento del océano Austral. Un buen ejemplo de esto es el sitio Palmer, de Investigación ecológica a largo plazo, sobre la costa oeste de la península Antártica.
Satélites: Los satélites representan la tecnología oceanográfica más importante de la modernidad [3]. A partir de las observaciones satelitales, se produjeron numerosos avances en nuestros conocimientos básicos de los océanos [4], ya que se resolvieron características tanto regionales como mundiales asociadas a la circulación de mesoescala de las variables físicas y biológicas como las corrientes y la distribución del fitoplancton. Los datos satelitales son fundamentales para la predicción del estado climático y oceánico. Los parámetros físicos obtenidos a través de sensores basados en el espacio brindan información sobre la temperatura de la superficie oceánica, la velocidad y la dirección del viento, la topografía de la superficie marítima, la distribución y el grosor del hielo marino. Los parámetros biológicos y químicos, por su parte, pueden obtenerse a través de radiómetros de coloración oceánica. Las nuevas tecnologías permiten hacer el seguimiento del grosor del hielo marino. El advenimiento de los vehículos aéreos no tripulados (AUV) ahora ofrece sistemas de altitudes más bajas que pueden recopilar datos a escala regional.
Radares en tierra: Los radares de alta frecuencia miden en simultáneo las velocidades de la corriente superficial del océano en un área de cientos de millas cuadradas. Cada sitio mide los componentes radiales de la velocidad de la superficie oceánica que se dirige hacia el sitio o se aleja de este [5, 6] y los componentes de la velocidad aproximada permite estimar las corrientes superficiales (del metro superior de la columna de agua) [7].
Anclajes océanicos: Desde la década del sesenta, las boyas modernas permiten realizar una amplia gama de estudios orientados a tratar la influencia del océano en el clima y brindan información sobre la biogeoquímica del mar, en particular mediante trampas de sedimento (Fig. 5).
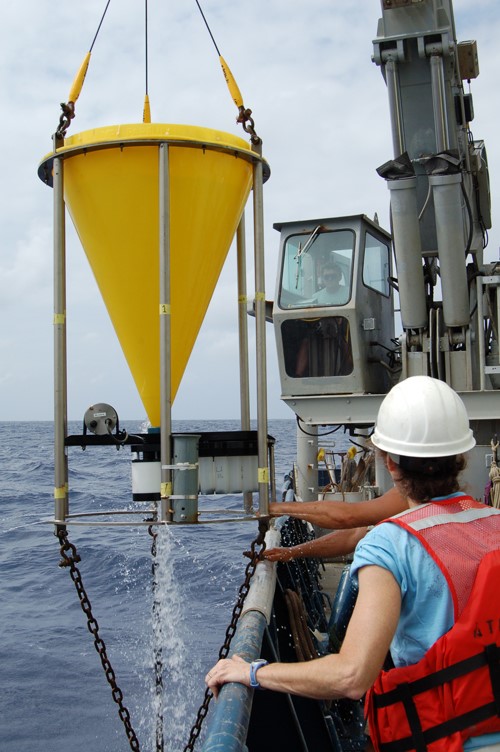
Figura 5. Uso de trampa de sedimento para recoger partículas que llueven desde la superficie en períodos de meses (Imagen: Skylar Beyer)

Figura 6. Perfilador acústico de corrientes Doppler que puede anclarse en cualquier parte de la columna de agua para realizar mediciones continuas de las corrientes (Imagen: ASCA)
Los anclajes son la piedra fundamental de muchas de las redes oceánicas mundiales que estudian la interacción entre el océano y la atmósfera, así como las corrientes y fuerzas oceánicas (Fig. 6). También forman la base de la red mundial de sistemas de advertencia ante tsunamis. Continuarán siendo un elemento clave de la infraestructura de observación oceánica. Muchos de estos enfoques también se utilizan para estudiar las interacciones entre el océano y el hielo, y utilizan el hielo como como anclaje para instalar sensores que cuelguen por debajo de este.
Boyas de deriva y flotadores: Las plataformas de boyas de deriva pasivas son herramientas importantes para crear mapas superficiales y subsuperficiales de las propiedades oceánicas. Estas plataformas son relativamente económicas, por lo cual pueden utilizarse en grandes cantidades. Las boyas de deriva incorporan numerosos sensores y permiten crear mapas mundiales de circulación superficial. Los primeros dispositivos de flotabilidad neutral se diseñaron para observar las corrientes subsuperficiales [8]. Los flotadores subsuperficiales se implementaron a principios de la década del noventa e incluían funciones de comunicación [9]. En la actualidad, integran el programa internacional ARGO, que tiene 3800 flotadores desplegados en los océanos de todo el mundo (Fig.7).
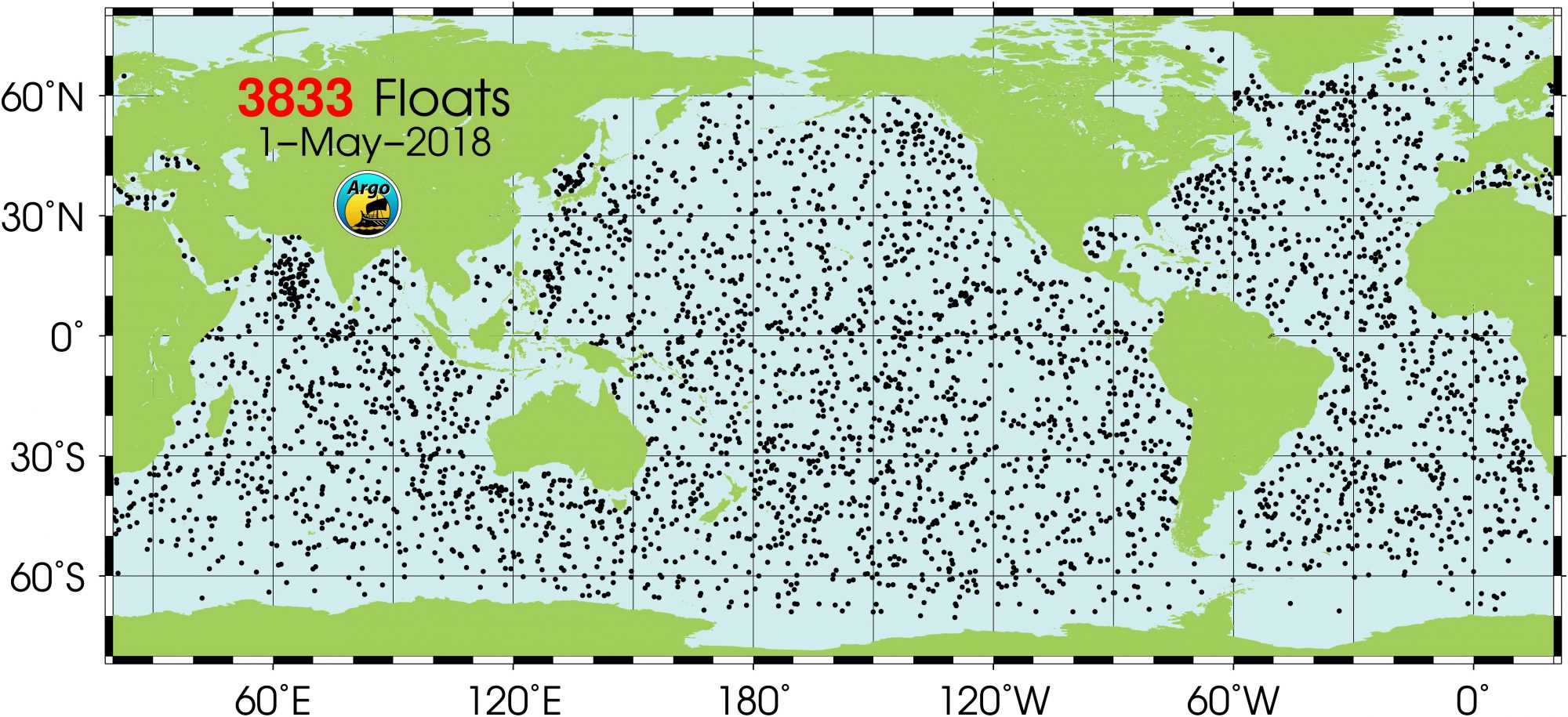
Figura 7. Implementación mundial de flotadores ARGO el 1 de mayo de 2018 (http://www.argo.ucsd.edu/).
Planeadores submarinos: una variedad de vehículos subacuáticos autónomos que utilizan pequeñas variaciones en la flotabilidad en conjunto con alas para convertir el movimiento vertical en movimiento horizontal (Fig. 8) y, por eso, pueden propulsarse hacia adelante con un consumo energético muy bajo [10]. Los planeadores submarinos siguen un trayecto serrado en el agua y suministran datos sobre grandes escalas temporales y espaciales. Navegan con la ayuda de coordenadas periódicas de posición superficial basadas en GPS, sensores de presión e inclinación, y brújulas magnéticas. Los planeadores submarinos utilizan propulsión basada en la flotabilidad y ofrecen una gran cobertura y duración, con misiones que duran hasta un año y recorren 10 000 km [11, 12, 13, 14].

Figura 8. Planeador submarino a batería que se sumerge en forma repetida durante varios días con un rumbo predeterminado para recoger datos físicos y químicos (Imagen: Bluefin Robotics)

Figura 9. Descenso de un vehículo subacuático autónomo hacia el lecho marino para investigar comunidades bentónicas no perturbadas (Imagen: D.W.H. Walton)
Vehículos subacuáticos autónomos (AUV) impulsados por propulsor: Los AUV funcionan con baterías o células de combustible y pueden funcionar en profundidades de hasta 6000 metros (Fig. 9). Al igual que los planeadores submarinos, los AUV transmiten los datos a tierra a través de satélites. Entre las distintas determinaciones de posición y para una maniobra precisa, los AUV suelen incorporar sistemas de navegación por inercia para medir la aceleración del vehículo y, en combinación con la tecnología de velocidad Doppler, medir la tasa de desplazamiento. Un sensor de presión mide la posición vertical. A diferencia de los planeadores submarinos, los AUV pueden avanzar contra la mayoría de las corrientes, con una velocidad nominal de 3-5 nudos y, debido a eso, pueden hacer relevamientos sistemáticos de una línea, área o volumen específicos [15].
Marcas en animales: dado que las dimensiones de los sensores disminuyeron en forma considerable, es posible colocarlos en la fauna marina (ballenas, aves, focas y peces). Los animales recopilan datos mientras realizan sus desplazamientos normales, lo cual genera conjuntos de datos de suma utilidad sobre la física, la química y la biología de las zonas donde viven y se alimentan [16].

Figura 10. Las cámaras y los sensores electrónicos que pueden colocarse en elefantes marinos y pingüinos para registrar la actividad alimentaria y de inmersión también arrojan datos detallados sobre la temperatura y los perfiles de salinidad del océano Austral (Imagen: Christophe Guinet CEBC-SNO-MEMO)